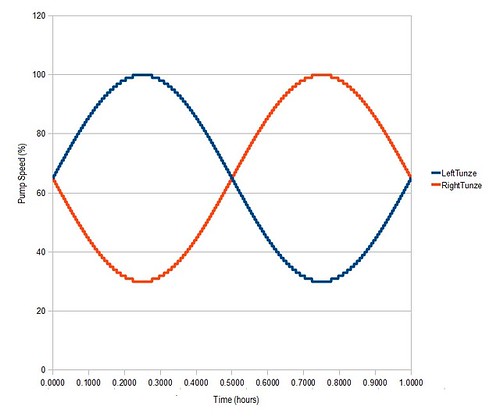
I have a pair of Tunze Stream 6105's. I will likely do something more complex later, but this is what I put together for now. I found rimai's tunze pulsing functions but I wanted a little more, so I wrote a quick sine wave function to control them. Basically it does this:
Then I added on the pulsing code to pulse from the minimum up to the sine wave flow.
//*** Define only one mode ***
//#define TUNZE_MODE_SINE // sine wave, no pulse
//#define TUNZE_MODE_LONG // no sine wave, long pulse
//#define TUNZE_MODE_SHORT // no sine wave, short pulse
//#define TUNZE_MODE_LONGSINE // sine wave, long pulse
#define TUNZE_MODE_SHORTSINE // sine wave, short pulse
#define TUNZE_MIN 30
#define TUNZE_MAX 75
#define TUNZE_SINE_SEC 23400
#define TUNZE_SINE_SYNC false
#define TUNZE_LONGPULSE_SEC 2
#define TUNZE_LONGPULSE_SYNC true
#define TUNZE_SHORTPULSE_MS 500
#define TUNZE_SHORTPULSE_SYNC true
//PulseMinSpeed - % for minimal speed
//PulseMaxSpeed - % for maximum speed
//PulseDuration - Duration (milliseconds) in which each pulse will be held. The pump will stay at minimal speed for PulseDuration and will stay at maximum speed for PulseDuration.
//PulseSync - true if you want to sync pumps to same cycle. one false and one true if you want to anti-sync pumps.
byte TunzeShortPulse(byte PulseMinSpeed, byte PulseMaxSpeed, int PulseDuration, boolean PulseSync)
{
byte tspeed=0;
PulseMinSpeed=constrain(PulseMinSpeed,30,100);
PulseMaxSpeed=constrain(PulseMaxSpeed,30,100);
tspeed=(millis()%(PulseDuration*2)<PulseDuration?PulseMinSpeed:PulseMaxSpeed);
if (PulseSync)
return tspeed;
else
return (tspeed==PulseMinSpeed)?PulseMaxSpeed:PulseMinSpeed;
}
//PulseMinSpeed - % for minimal speed
//PulseMaxSpeed - % for maximum speed
//PulseDuration - Duration (seconds) in which each pulse will be held. The pump will stay at minimal speed for PulseDuration and will stay at maximum speed for PulseDuration.
//PulseSync - true if you want to sync pumps to same cycle. one false and one true if you want to anti-sync pumps.
byte TunzeLongPulse(byte PulseMinSpeed, byte PulseMaxSpeed, int PulseDuration, boolean PulseSync)
{
byte tspeed=0;
PulseMinSpeed=constrain(PulseMinSpeed,30,100);
PulseMaxSpeed=constrain(PulseMaxSpeed,30,100);
tspeed=(now()%(PulseDuration*2)<PulseDuration?PulseMinSpeed:PulseMaxSpeed);
if (PulseSync)
return tspeed;
else
return (tspeed==PulseMinSpeed)?PulseMaxSpeed:PulseMinSpeed;
}
byte TunzeSineWave(boolean isleftpump, byte minspeed, byte maxspeed, int period_sec) {
double x,y;
x=double(now()%(period_sec));
x/=period_sec;
x*=2.0*PI;
if (!isleftpump) x+=PI; // shift the sine wave for the right pump
y=sin(x);// y is now between -1 and 1
y+=1.0; // y is now between 0 and 2
y/=2.0; // y is now between 0 and 1
// now compute the tunze speed
y*=double(maxspeed-minspeed);
y+=double(minspeed);
y+=0.5; // for proper rounding
// y is now between minspeed and maxspeed, constrain for safety
return constrain(byte(y),30,100);
}
void RunTunzes() {
#ifdef TUNZE_MODE_SINE
ReefAngel.PWM.SetDaylight(TunzeSineWave(true,TUNZE_MIN,TUNZE_MAX,TUNZE_SINE_SEC)); // left tunze
ReefAngel.PWM.SetActinic(TunzeSineWave(TUNZE_SINE_SYNC,TUNZE_MIN,TUNZE_MAX,TUNZE_SINE_SEC)); // right tunze
#endif
#ifdef TUNZE_MODE_LONG
ReefAngel.PWM.SetDaylight(TunzeLongPulse(TUNZE_MIN,TUNZE_MAX,TUNZE_LONGPULSE_SEC,true)); // left tunze
ReefAngel.PWM.SetActinic(TunzeLongPulse(TUNZE_MIN,TUNZE_MAX,TUNZE_LONGPULSE_SEC,TUNZE_LONGPULSE_SYNC)); // right tunze
#endif
#ifdef TUNZE_MODE_SHORT
ReefAngel.PWM.SetDaylight(TunzeShortPulse(TUNZE_MIN,TUNZE_MAX,TUNZE_SHORTPULSE_MS,true)); // left tunze
ReefAngel.PWM.SetActinic(TunzeShortPulse(TUNZE_MIN,TUNZE_MAX,TUNZE_SHORTPULSE_MS,TUNZE_SHORTPULSE_SYNC)); // right tunze
#endif
#ifdef TUNZE_MODE_LONGSINE
ReefAngel.PWM.SetDaylight(TunzeLongPulse(TUNZE_MIN,TunzeSineWave(true,TUNZE_MIN,TUNZE_MAX,TUNZE_SINE_SEC),TUNZE_LONGPULSE_SEC,true)); // left tunze
ReefAngel.PWM.SetActinic(TunzeLongPulse(TUNZE_MIN,TunzeSineWave(TUNZE_SINE_SYNC,TUNZE_MIN,TUNZE_MAX,TUNZE_SINE_SEC),TUNZE_LONGPULSE_SEC,TUNZE_LONGPULSE_SYNC)); // right tunze
#endif
#ifdef TUNZE_MODE_SHORTSINE
ReefAngel.PWM.SetDaylight(TunzeShortPulse(TUNZE_MIN,TunzeSineWave(true,TUNZE_MIN,TUNZE_MAX,TUNZE_SINE_SEC),TUNZE_SHORTPULSE_MS,true)); // left tunze
ReefAngel.PWM.SetActinic(TunzeShortPulse(TUNZE_MIN,TunzeSineWave(TUNZE_SINE_SYNC,TUNZE_MIN,TUNZE_MAX,TUNZE_SINE_SEC),TUNZE_SHORTPULSE_MS,TUNZE_SHORTPULSE_SYNC)); // right tunze
#endif
}
I just set up the #defines and call RunTunzes from in the loop.
Discocarp, how are you liking this code so far? I have 2 6095's that I'd like to control with this same code, I'm still green to putting code together with my RA, can you put it in the right places for me? Thanks
I guess my challenge is translating the code above to work on ports 0 and 1 on the analogue dimming expansion. I don't know how to program my RA + unit to see the expansion or use it.
There are basically 5 waveforms that discocarp created.
TUNZE_MODE_SINE // sine wave, no pulse
TUNZE_MODE_LONG // no sine wave, long pulse
TUNZE_MODE_SHORT // no sine wave, short pulse
TUNZE_MODE_LONGSINE // sine wave, long pulse
TUNZE_MODE_SHORTSINE // sine wave, short pulse
Ok, what you do is copy the whole thing posted in that post and paste it at the end of your code after the last }
Change the code you pasted to whichever function you want to use.
Please note that only one mode should be uncommented.
//*** Define only one mode ***
#define TUNZE_MODE_SINE // sine wave, no pulse
//#define TUNZE_MODE_LONG // no sine wave, long pulse
//#define TUNZE_MODE_SHORT // no sine wave, short pulse
//#define TUNZE_MODE_LONGSINE // sine wave, long pulse
//#define TUNZE_MODE_SHORTSINE // sine wave, short pulse
void setup()
{
// This must be the first line
ReefAngel.Init(); //Initialize controller
// Ports toggled in Feeding Mode
ReefAngel.FeedingModePorts = Port1Bit | Port8Bit;
ReefAngel.FeedingModePortsE[0] = Port7Bit | Port8Bit;
// Ports toggled in Water Change Mode
ReefAngel.WaterChangePorts = Port1Bit |Port5Bit | Port6Bit | Port7Bit | Port8Bit;
ReefAngel.WaterChangePortsE[0] = Port5Bit | Port7Bit | Port8Bit;
// Ports toggled when Lights On / Off menu entry selected
ReefAngel.LightsOnPorts = Port2Bit | Port3Bit | Port4Bit ;
ReefAngel.LightsOnPortsE[0] = 0;
// Ports turned off when Overheat temperature exceeded
ReefAngel.OverheatShutoffPorts = Port2Bit | Port3Bit | Port4Bit;
ReefAngel.OverheatShutoffPortsE[0] = Port5Bit | Port7Bit | Port8Bit;
// Use T1 probe as temperature and overheat functions
ReefAngel.TempProbe = T1_PROBE;
ReefAngel.OverheatProbe = T1_PROBE;
// Setup ATO Port for AI communication
ReefAngel.AI.SetPort( highATOPin );
// Ports that are always on
ReefAngel.Relay.On( Box1_Port8 ); //Return Pump
ReefAngel.Relay.On( Box1_Port6 ); //BioPellet Reactor
////// Place additional initialization code below here
//*** Define only one mode ***
//#define TUNZE_MODE_SINE // sine wave, no pulse
//#define TUNZE_MODE_LONG // no sine wave, long pulse
//#define TUNZE_MODE_SHORT // no sine wave, short pulse
//#define TUNZE_MODE_LONGSINE // sine wave, long pulse
//#define TUNZE_MODE_SHORTSINE // sine wave, short pulse
//PulseMinSpeed - % for minimal speed
//PulseMaxSpeed - % for maximum speed
//PulseDuration - Duration (milliseconds) in which each pulse will be held. The pump will stay at minimal speed for PulseDuration and will stay at maximum speed for PulseDuration.
//PulseSync - true if you want to sync pumps to same cycle. one false and one true if you want to anti-sync pumps.
byte TunzeShortPulse(byte PulseMinSpeed, byte PulseMaxSpeed, int PulseDuration, boolean PulseSync)
{
byte tspeed=0;
PulseMinSpeed=constrain(PulseMinSpeed,30,100);
PulseMaxSpeed=constrain(PulseMaxSpeed,30,100);
tspeed=(millis()%(PulseDuration*2)<PulseDuration?PulseMinSpeed:PulseMaxSpeed);
if (PulseSync)
return tspeed;
else
return (tspeed==PulseMinSpeed)?PulseMaxSpeed:PulseMinSpeed;
}
//PulseMinSpeed - % for minimal speed
//PulseMaxSpeed - % for maximum speed
//PulseDuration - Duration (seconds) in which each pulse will be held. The pump will stay at minimal speed for PulseDuration and will stay at maximum speed for PulseDuration.
//PulseSync - true if you want to sync pumps to same cycle. one false and one true if you want to anti-sync pumps.
byte TunzeLongPulse(byte PulseMinSpeed, byte PulseMaxSpeed, int PulseDuration, boolean PulseSync)
{
byte tspeed=0;
PulseMinSpeed=constrain(PulseMinSpeed,30,100);
PulseMaxSpeed=constrain(PulseMaxSpeed,30,100);
tspeed=(now()%(PulseDuration*2)<PulseDuration?PulseMinSpeed:PulseMaxSpeed);
if (PulseSync)
return tspeed;
else
return (tspeed==PulseMinSpeed)?PulseMaxSpeed:PulseMinSpeed;
}
if (ReefAngel.LowATO.IsActive()) ReefAngel.Relay.On(Port7); else ReefAngel.Relay.Off(Port7);
// moonlight function // 6p to 8p
if ( (hour() >= 18) && (hour() < 20) ) ReefAngel.Relay.On( Port3 );
//lighting fonction with night mode
if ( (hour() >= 18) || (hour() < 10) ) // from 7p - 10a
{
ReefAngel.AI.SetChannel(White,0);
ReefAngel.AI.SetChannel(Blue,0);
ReefAngel.AI.SetChannel(RoyalBlue,MoonPhase()*.06);
}
else
// during the day
if ( (hour() >= 10) || (hour() <= 18) ) // from 10a - 6p
{
}
////// Place your custom code above here
// This should always be the last line
ReefAngel.Portal("carlii", "*********");
ReefAngel.ShowInterface();
}
byte x,y;
char text[10];
void DrawCustomMain()
{
// the graph is drawn/updated when we exit the main menu &
// when the parameters are saved
ReefAngel.LCD.Clear(BtnActiveColor,5,0,127,11);
ReefAngel.LCD.DrawText(DefaultBGColor,BtnActiveColor,30,3,"My Reef Angel");
ReefAngel.LCD.DrawDate(6, 122);
pingSerial();
#if defined DisplayLEDPWM && ! defined RemoveAllLights
ReefAngel.LCD.DrawMonitor(15, 15, ReefAngel.Params);
#else // defined DisplayLEDPWM && ! defined RemoveAllLights
ReefAngel.LCD.DrawMonitor(15, 15, ReefAngel.Params);
#endif // defined DisplayLEDPWM && ! defined RemoveAllLights
pingSerial();
ReefAngel.LCD.Clear(DefaultFGColor,5,52,127,52);
ReefAngel.LCD.DrawText(COLOR_DARKGOLDENROD,DefaultBGColor,15,55,"Aqua Illumination");
x=15;
y=68;
ReefAngel.LCD.DrawText(COLOR_DARKGOLDENROD,DefaultBGColor,x,y,"White:");
ConvertNumToString(text, ReefAngel.AI.GetChannel(White), 1);
strcat(text," ");
ReefAngel.LCD.DrawText(COLOR_DARKGOLDENROD,DefaultBGColor,x+74,y,text);
y+=10;
pingSerial();
ReefAngel.LCD.DrawText(COLOR_DARKGOLDENROD,DefaultBGColor,x,y,"Blue:");
ConvertNumToString(text, ReefAngel.AI.GetChannel(Blue), 1);
strcat(text," ");
ReefAngel.LCD.DrawText(COLOR_DARKGOLDENROD,DefaultBGColor,x+74,y,text);
y+=10;
pingSerial();
ReefAngel.LCD.DrawText(COLOR_DARKGOLDENROD,DefaultBGColor,x,y,"Royal Blue:");
ConvertNumToString(text, ReefAngel.AI.GetChannel(RoyalBlue), 1);
strcat(text," ");
ReefAngel.LCD.DrawText(COLOR_DARKGOLDENROD,DefaultBGColor,x+74,y,text);
y+=10;
pingSerial();
byte TempRelay = ReefAngel.Relay.RelayData;
TempRelay &= ReefAngel.Relay.RelayMaskOff;
TempRelay |= ReefAngel.Relay.RelayMaskOn;
ReefAngel.LCD.DrawOutletBox(12, 97, TempRelay);
pingSerial();
TempRelay = ReefAngel.Relay.RelayDataE[0];
TempRelay &= ReefAngel.Relay.RelayMaskOffE[0];
TempRelay |= ReefAngel.Relay.RelayMaskOnE[0];
ReefAngel.LCD.DrawOutletBox(12, 109, TempRelay);
#include <ReefAngel_Features.h>
#include <Globals.h>
#include <RA_Wifi.h>
#include <Wire.h>
#include <OneWire.h>
#include <Time.h>
#include <DS1307RTC.h>
#include <InternalEEPROM.h>
#include <RA_NokiaLCD.h>
#include <RA_ATO.h>
#include <RA_Joystick.h>
#include <LED.h>
#include <RA_TempSensor.h>
#include <Relay.h>
#include <RA_PWM.h>
#include <Timer.h>
#include <Memory.h>
#include <InternalEEPROM.h>
#include <RA_Colors.h>
#include <RA_CustomColors.h>
#include <Salinity.h>
#include <RF.h>
#include <IO.h>
#include <ORP.h>
#include <AI.h>
#include <PH.h>
#include <WaterLevel.h>
#include <ReefAngel.h>
////// Place global variable code below here
////// Place global variable code above here
void setup()
{
// This must be the first line
ReefAngel.Init(); //Initialize controller
// Ports toggled in Feeding Mode
ReefAngel.FeedingModePorts = Port1Bit | Port8Bit;
ReefAngel.FeedingModePortsE[0] = Port7Bit | Port8Bit;
// Ports toggled in Water Change Mode
ReefAngel.WaterChangePorts = Port1Bit |Port5Bit | Port6Bit | Port7Bit | Port8Bit;
ReefAngel.WaterChangePortsE[0] = Port5Bit | Port7Bit | Port8Bit;
// Ports toggled when Lights On / Off menu entry selected
ReefAngel.LightsOnPorts = Port2Bit | Port3Bit | Port4Bit ;
ReefAngel.LightsOnPortsE[0] = 0;
// Ports turned off when Overheat temperature exceeded
ReefAngel.OverheatShutoffPorts = Port2Bit | Port3Bit | Port4Bit;
ReefAngel.OverheatShutoffPortsE[0] = Port5Bit | Port7Bit | Port8Bit;
// Use T1 probe as temperature and overheat functions
ReefAngel.TempProbe = T1_PROBE;
ReefAngel.OverheatProbe = T1_PROBE;
// Setup ATO Port for AI communication
ReefAngel.AI.SetPort( highATOPin );
// Ports that are always on
ReefAngel.Relay.On( Box1_Port8 ); //Return Pump
ReefAngel.Relay.On( Box1_Port6 ); //BioPellet Reactor
////// Place additional initialization code below here
////// Place additional initialization code above here
}
void loop()
{
ReefAngel.WaterLevelATO(Port1,1800,45,55);
ReefAngel.DayLights( Port2 );
ReefAngel.DayLights( Port3 );
ReefAngel.DayLights( Port4 );
ReefAngel.StandardFan( Port8 );
ReefAngel.DosingPumpRepeat1( Box1_Port1 );
ReefAngel.DosingPumpRepeat2( Box1_Port2 );
ReefAngel.StandardFan( Box1_Port4 );
ReefAngel.StandardLights( Box1_Port3,20,0,6,0);
ReefAngel.StandardHeater( Box1_Port7 );
ReefAngel.StandardHeater( Box1_Port5 );
ReefAngel.Relay.On(Port5);
ReefAngel.Relay.On(Port6);
ReefAngel.AI.ChannelWhiteSlope();
ReefAngel.AI.ChannelBlueSlope();
ReefAngel.AI.ChannelRoyalBlueSlope();
////// Place your custom code below here
RunTunzes();
///skimmer float switch
if (ReefAngel.LowATO.IsActive()) ReefAngel.Relay.On(Port7);
else ReefAngel.Relay.Off(Port7);
// moonlight function // 6p to 8p
if ( (hour() >= 18) && (hour() < 20) ) ReefAngel.Relay.On( Port3 );
//lighting fonction with night mode
if ( (hour() >= 18) || (hour() < 10) ) // from 7p - 10a
{
ReefAngel.AI.SetChannel(White,0);
ReefAngel.AI.SetChannel(Blue,0);
ReefAngel.AI.SetChannel(RoyalBlue,MoonPhase()*.06);
}
else
// during the day
if ( (hour() >= 10) || (hour() <= 18) ) // from 10a - 6p
{
}
////// Place your custom code above here
// This should always be the last line
ReefAngel.Portal("carlii", "*********");
ReefAngel.ShowInterface();
}
byte x,y;
char text[10];
void DrawCustomMain()
{
// the graph is drawn/updated when we exit the main menu &
// when the parameters are saved
ReefAngel.LCD.Clear(BtnActiveColor,5,0,127,11);
ReefAngel.LCD.DrawText(DefaultBGColor,BtnActiveColor,30,3,"My Reef Angel");
ReefAngel.LCD.DrawDate(6, 122);
pingSerial();
#if defined DisplayLEDPWM && ! defined RemoveAllLights
ReefAngel.LCD.DrawMonitor(15, 15, ReefAngel.Params,
ReefAngel.PWM.GetDaylightValue(), ReefAngel.PWM.GetActinicValue());
#else // defined DisplayLEDPWM && ! defined RemoveAllLights
ReefAngel.LCD.DrawMonitor(15, 15, ReefAngel.Params);
#endif // defined DisplayLEDPWM && ! defined RemoveAllLights
pingSerial();
ReefAngel.LCD.Clear(DefaultFGColor,5,52,127,52);
ReefAngel.LCD.DrawText(COLOR_DARKGOLDENROD,DefaultBGColor,15,55,"Aqua Illumination");
x=15;
y=68;
ReefAngel.LCD.DrawText(COLOR_DARKGOLDENROD,DefaultBGColor,x,y,"White:");
ConvertNumToString(text, ReefAngel.AI.GetChannel(White), 1);
strcat(text," ");
ReefAngel.LCD.DrawText(COLOR_DARKGOLDENROD,DefaultBGColor,x+74,y,text);
y+=10;
pingSerial();
ReefAngel.LCD.DrawText(COLOR_DARKGOLDENROD,DefaultBGColor,x,y,"Blue:");
ConvertNumToString(text, ReefAngel.AI.GetChannel(Blue), 1);
strcat(text," ");
ReefAngel.LCD.DrawText(COLOR_DARKGOLDENROD,DefaultBGColor,x+74,y,text);
y+=10;
pingSerial();
ReefAngel.LCD.DrawText(COLOR_DARKGOLDENROD,DefaultBGColor,x,y,"Royal Blue:");
ConvertNumToString(text, ReefAngel.AI.GetChannel(RoyalBlue), 1);
strcat(text," ");
ReefAngel.LCD.DrawText(COLOR_DARKGOLDENROD,DefaultBGColor,x+74,y,text);
y+=10;
pingSerial();
byte TempRelay = ReefAngel.Relay.RelayData;
TempRelay &= ReefAngel.Relay.RelayMaskOff;
TempRelay |= ReefAngel.Relay.RelayMaskOn;
ReefAngel.LCD.DrawOutletBox(12, 97, TempRelay);
pingSerial();
TempRelay = ReefAngel.Relay.RelayDataE[0];
TempRelay &= ReefAngel.Relay.RelayMaskOffE[0];
TempRelay |= ReefAngel.Relay.RelayMaskOnE[0];
ReefAngel.LCD.DrawOutletBox(12, 109, TempRelay);
// Water Level
ReefAngel.LCD.DrawText( COLOR_DARKGOLDENROD,DefaultBGColor,75,36, "WL:" );
ReefAngel.LCD.DrawText( COLOR_DARKGOLDENROD,DefaultBGColor,99,36, ReefAngel.WaterLevel.GetLevel() );
pingSerial();
}
void DrawCustomGraph()
{
}
//*** Define only one mode ***
//#define TUNZE_MODE_SINE // sine wave, no pulse
//#define TUNZE_MODE_LONG // no sine wave, long pulse
//#define TUNZE_MODE_SHORT // no sine wave, short pulse
//#define TUNZE_MODE_LONGSINE // sine wave, long pulse
//#define TUNZE_MODE_SHORTSINE // sine wave, short pulse
#define TUNZE_MIN 30
#define TUNZE_MAX 75
#define TUNZE_SINE_SEC 23400
#define TUNZE_SINE_SYNC false
#define TUNZE_LONGPULSE_SEC 2
#define TUNZE_LONGPULSE_SYNC true
#define TUNZE_SHORTPULSE_MS 500
#define TUNZE_SHORTPULSE_SYNC true
//PulseMinSpeed - % for minimal speed
//PulseMaxSpeed - % for maximum speed
//PulseDuration - Duration (milliseconds) in which each pulse will be held. The pump will stay at minimal speed for PulseDuration and will stay at maximum speed for PulseDuration.
//PulseSync - true if you want to sync pumps to same cycle. one false and one true if you want to anti-sync pumps.
byte TunzeShortPulse(byte PulseMinSpeed, byte PulseMaxSpeed, int PulseDuration, boolean PulseSync)
{
byte tspeed=0;
PulseMinSpeed=constrain(PulseMinSpeed,30,100);
PulseMaxSpeed=constrain(PulseMaxSpeed,30,100);
tspeed=(millis()%(PulseDuration*2)<PulseDuration?PulseMinSpeed:PulseMaxSpeed);
if (PulseSync)
return tspeed;
else
return (tspeed==PulseMinSpeed)?PulseMaxSpeed:PulseMinSpeed;
}
//PulseMinSpeed - % for minimal speed
//PulseMaxSpeed - % for maximum speed
//PulseDuration - Duration (seconds) in which each pulse will be held. The pump will stay at minimal speed for PulseDuration and will stay at maximum speed for PulseDuration.
//PulseSync - true if you want to sync pumps to same cycle. one false and one true if you want to anti-sync pumps.
byte TunzeLongPulse(byte PulseMinSpeed, byte PulseMaxSpeed, int PulseDuration, boolean PulseSync)
{
byte tspeed=0;
PulseMinSpeed=constrain(PulseMinSpeed,30,100);
PulseMaxSpeed=constrain(PulseMaxSpeed,30,100);
tspeed=(now()%(PulseDuration*2)<PulseDuration?PulseMinSpeed:PulseMaxSpeed);
if (PulseSync)
return tspeed;
else
return (tspeed==PulseMinSpeed)?PulseMaxSpeed:PulseMinSpeed;
}
byte TunzeSineWave(boolean isleftpump, byte minspeed, byte maxspeed, int period_sec) {
double x,y;
x=double(now()%(period_sec));
x/=period_sec;
x*=2.0*PI;
if (!isleftpump) x+=PI; // shift the sine wave for the right pump
y=sin(x);// y is now between -1 and 1
y+=1.0; // y is now between 0 and 2
y/=2.0; // y is now between 0 and 1
// now compute the tunze speed
y*=double(maxspeed-minspeed);
y+=double(minspeed);
y+=0.5; // for proper rounding
// y is now between minspeed and maxspeed, constrain for safety
return constrain(byte(y),30,100);
}
void RunTunzes() {
#ifdef TUNZE_MODE_SINE
ReefAngel.PWM.SetDaylight(TunzeSineWave(true,TUNZE_MIN,TUNZE_MAX,TUNZE_SINE_SEC)); // left tunze
ReefAngel.PWM.SetActinic(TunzeSineWave(TUNZE_SINE_SYNC,TUNZE_MIN,TUNZE_MAX,TUNZE_SINE_SEC)); // right tunze
#endif
#ifdef TUNZE_MODE_LONG
ReefAngel.PWM.SetDaylight(TunzeLongPulse(TUNZE_MIN,TUNZE_MAX,TUNZE_LONGPULSE_SEC,true)); // left tunze
ReefAngel.PWM.SetActinic(TunzeLongPulse(TUNZE_MIN,TUNZE_MAX,TUNZE_LONGPULSE_SEC,TUNZE_LONGPULSE_SYNC)); // right tunze
#endif
#ifdef TUNZE_MODE_SHORT
ReefAngel.PWM.SetDaylight(TunzeShortPulse(TUNZE_MIN,TUNZE_MAX,TUNZE_SHORTPULSE_MS,true)); // left tunze
ReefAngel.PWM.SetActinic(TunzeShortPulse(TUNZE_MIN,TUNZE_MAX,TUNZE_SHORTPULSE_MS,TUNZE_SHORTPULSE_SYNC)); // right tunze
#endif
#ifdef TUNZE_MODE_LONGSINE
ReefAngel.PWM.SetDaylight(TunzeLongPulse(TUNZE_MIN,TunzeSineWave(true,TUNZE_MIN,TUNZE_MAX,TUNZE_SINE_SEC),TUNZE_LONGPULSE_SEC,true)); // left tunze
ReefAngel.PWM.SetActinic(TunzeLongPulse(TUNZE_MIN,TunzeSineWave(TUNZE_SINE_SYNC,TUNZE_MIN,TUNZE_MAX,TUNZE_SINE_SEC),TUNZE_LONGPULSE_SEC,TUNZE_LONGPULSE_SYNC)); // right tunze
#endif
#ifdef TUNZE_MODE_SHORTSINE
ReefAngel.PWM.SetDaylight(TunzeShortPulse(TUNZE_MIN,TunzeSineWave(true,TUNZE_MIN,TUNZE_MAX,TUNZE_SINE_SEC),TUNZE_SHORTPULSE_MS,true)); // left tunze
ReefAngel.PWM.SetActinic(TunzeShortPulse(TUNZE_MIN,TunzeSineWave(TUNZE_SINE_SYNC,TUNZE_MIN,TUNZE_MAX,TUNZE_SINE_SEC),TUNZE_SHORTPULSE_MS,TUNZE_SHORTPULSE_SYNC)); // right tunze
#endif
}